
中国团队完成软体机器人万米深海操控及自主游动实验
··

《自然》封面发表之江实验室与浙江大学合作的仿生深海软体机器人最新研究。之江实验室供图
位于浙江的之江实验室4日发布消息,国际顶级期刊《自然》封面发表之江实验室与浙江大学合作的仿生深海软体机器人最新研究:马里亚纳海沟的自驱动软体机器人。该研究团队率先实现软体机器人的万米深海操控以及深海自主游动实验。
之江实验室智能机器人研究中心的高级研究专员李国瑞为该论文第一作者,之江实验室智能机器人研究中心工程专员梁艺鸣为第二作者,浙江大学李铁风为通讯作者,之江实验室主任朱世强、顾建军等为共同作者。
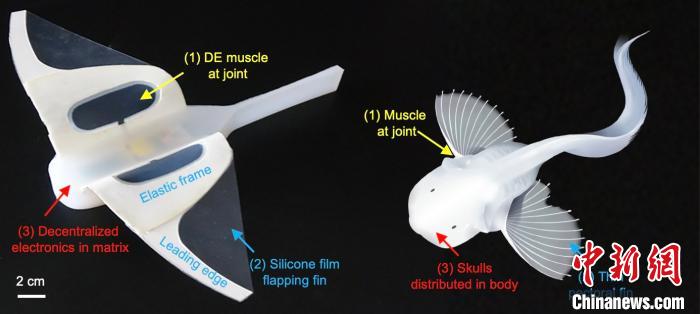
马里亚纳海沟的自驱动软体机器人。之江实验室供图
研发适应万米静水压的软体机器人
马里亚纳海沟是已知的海洋最深处,水压高、温度低、完全黑暗,被称为“地球第四极”。随着深潜技术的不断发展,科研发现在其6000—11000米之间的极高压深水区,仍有数百种物种生存,狮子鱼就是其中的典型代表。
生物学研究发现,狮子鱼的骨骼细碎状分布在凝胶状柔软的身体中,能承受近百兆帕的压力。“狮子鱼的奇特构造带给我们很大启发。如果能将深海的‘生命奥秘’化作‘机器之力’,就可以研发出自适应深海极端环境的仿生、软体、小型化智能深海机器人,既可助力深海探索,又能发展新型机器人与智能装备。”李国瑞说。
该项目于2018年5月启动,研发的仿生深海软体机器人形似一条鱼,长22cm,翼展宽度28cm,大约为一张A4纸的长宽。控制电路、电池等硬质器件被融入集成在凝胶状的软体机身中;通过设计调节器件和软体的材料与结构,实现了机器人无需耐压外壳,便能承受万米级别的深海静水压力。
“相比于传统的‘铠甲式’抗高压深潜装备,我们以全新技术路线研制仿生深海软体机器人,争取大幅降低深海探测的难度和成本。”李国瑞说。
创新“智能人工肌肉驱动”
深海机器人如何实现推进?据悉,机器人依靠的是自身携带的小型化能源控制系统及两翼中间椭圆形部位的介电弹性体人工肌肉。当硅胶体中的电子器件产生电信号时,介电弹性体会在该电压信号的刺激下产生像肌肉一样的变形模式,“仿生机器鱼”的双翼就会随着肌肉的伸缩进行扑翼运动,驱动机器人前进。
要实现介电弹性体在深海中的驱动,需克服在高压和低温条件下高分子材料的电驱动性能衰减问题。项目组与浙江大学化学工程与生物工程学院教授罗英武团队合作,研制了一种能适应深海低温、高压等极端环境的电驱动人工肌肉,即便是在马里亚纳海沟的低温(0—4℃)、高压环境(110MPa)下依旧能正常工作。
“我们的另一个研究突破在于,设计了一种能在高压低温环境下依然能保持良好电驱动性能的电驱动智能软材料。”李铁风说,适应深海静水压力的软—硬融合机器系统,以及适用于深海高压低温环境的新型介电高弹体驱动器,两项技术突破造就了这台全新的仿生深海软体机器人。

马里亚纳海沟的自驱动软体机器人研发团队。之江实验室供图
软体机器人应用前景广阔
为了进一步证实机器人在深海实地环境下的可靠性,在上海海洋大学、中科院深海所、大连海事大学、广东海洋地质调查局等单位的支持下,项目组研发的仿生机器人先后在马里亚纳海沟、中国南海等海域开展深海海试。
2019年12月,仿生深海软体机器人在马里亚纳海沟坐底,海试影像记录显示,在10900米海深处,该机器人实现了稳定扑翼驱动。2020年8月,该软体机器人在南海3224米海深处成功实现自主游动。
“机器人在深海、极地、高冲击性等恶劣及特种环境下,都具有良好的发展应用前景。”李国瑞表示,未来,项目组将继续研究深海软体智能设备的能源、驱动、感知一体化系统,提升仿生深海软体机器人的智能性,同时降低应用成本。
梁艺鸣介绍,“我们还计划将仿生软体机器人的关键技术运用到深潜器上,研制小型化的深海装备,实现深海通讯、深海检测等功能。”

 海报热榜
海报热榜
 相关推荐
相关推荐